【自動車制御】ドライバーの操作とクルマの制御
皆さん、こんにちは!エンジニアブロガーのgibsonです!
今回のお話は「自動車の制御」についてです。
普段私達が自動車を運転しているとき、自動車の内部ではどのような制御が行われているのかについてお話していきたいとおもいます。
今回のブログの構成は以下の通りになっています。
それでは早速始めて行きましょう!
1.自動車の制御とは?
まずは簡単に自動車の制御についてご説明していきます。私達が普段乗っている自動車には、エンジンやモータ、トランスミッションのような走行に必要な部品から、エアコンやシートヒータ、カーナビやステレオなど走行自体にはあまり関係のない快適装備など様々な部品が搭載されています。

現在の自動車ではこれらの部品の多くの部分が「電子制御」されているのです。
電子制御とはなにかというと、自動車の走行状況やスイッチのオンオフから得られる電子情報を「ECU(Elecrtic Control Unit)」で処理し各部品のアクチュエータ(モータなど)を適宜駆動させることで各部品を意図通り動作させることを言います。
さらに現代の自動車は電子制御を行う部品が非常に多くなったことで、制御を行うためのECUが複数搭載されています。これらのECUはそれぞれ、エンジンの制御を行うエンジンECUやモータの制御を行うモータECU、トランスミッションの制御を行うトランスミッションECUのように各ECUで制御を行う部品が分けられています。
このそれぞれ担当する部品の異なるECU同士で互いに情報をやり取りすることで、実際の自動車の走行状況に基づいた適切な制御を行うことが可能となります。このように複数の制御対象が情報をやり取りし、互いの状況を考慮した制御手法のことを「協調制御」といい、自動車だけでなく様々な分野で活用されています。

この電子制御によって私達ドライバーが自動車を運転する際のドライバービリティやドライビングプレジャー、さらには安全性の向上が図られています。
2.自動車制御の例
例えば私たちが自動車の運転を行う際に行われている制御の一つにエンジン制御があります。エンジン制御といってもエンジンに関する非常に多くの部品の制御を行っているのですが、その中には私たちがアクセルを踏み込む量によってエンジンの回転数を制御するものがあります。
これはどういうことかと言うと、運転をするときに「もっと速度を出したい」というようなときは通常アクセルの踏み込む量を大きくします。私たちがアクセルを踏み込むことで、アクセルに取り付けられたセンサーがアクセルの踏み込み量を認識し、エンジンを制御しているコンピュータにその情報を送ります。
エンジンのコンピュータはその情報をもとにドライバーが必要としているエンジン出力を求め、そのエンジン出力を得るためには「どの程度の空気をエンジンの中に取り込み」、「どの程度の燃料をエンジンに内に噴射するのか」というような情報を計算します。

そして計算結果に基づき、次はエンジンへの空気吸入量を調節する弁である「スロットルバルブ(下のAmazonのリンク参照)」 の開度(スロットルバルブは開いたり閉じたりすることでエンジンに吸入する空気の量を調節する)を大きくすることでエンジンに吸入される空気の量を増やします。

さらに、空気の量を増やすとともに燃焼させるガソリンの量も増やすことで大きなパワーを得ることができます。このときエンジンに噴射するガソリンの量を増やすために、ECUは「インジェクター(下のAmazon商品リンク参照)」と呼ばれるガソリンを噴射する装置の制御も同時に行うことで、ドライバーが求めるエンジンパワーを出力させるようになっているのです。
 ハイゼット S200V S200P S210P ミラ/ムーヴ/オプティ/ハイゼット&アトレ- / ミゼット2 燃料噴射装置 インジェクションノズル 23250-97204 2325097204 23250-97204-000")
しかも、ここまではあくまでエンジンのECUが行う制御であり、自動車全体としてはエンジンECUが行った制御をもとにさらに制御を行います。このように複数のコンピュータやECUのような制御装置がお互いに情報をやり取りして、その情報をもとに相互の制御を行う協調制御を行うことで、自動車はより安全で快適に走行しています。
このほかにも、アクセルの踏み込み量やブレーキの踏力によって加速減速に必要なギア比(いわゆるシフトレンジ)を計算し、その結果に応じてシフトレンジ(1速、2速、3速・・・)を変更するトランスミッション制御や、ハンドルの舵角(ハンドルを回す量)によってEPS(Electric Power Steering)、電動パワステの支援量を調節するEPS制御、ABS(Antilock Breaking System)のような急ブレーキ時にタイヤがロックすると自動でブレーキ量を抑えタイヤのロックを回避する制御など例を挙げるときりがないほど現在の自動車の至る所に電子制御は搭載されています。
かつての自動車の制御には「油圧」や直接人の力によってステアリングを操作するようにモータによる制御はありませんでした。
しかし今後は、ADAS(先進運転支援システム)や自動運転のように人の運転に機械が干渉し制御を行う装備が増えていく一方で、自動車の電子制御はより複雑化し高度なものになっていきます。
普段何気なく自動車を運転されている方でも、今回のブログをきっかけに「どのようにして自動車は動いているのだろう?」とか「1トン以上もある車体はなぜ人の力で方向転換できているのだろう?」というような自動車のメカニズムであったり仕組みについて興味を持つきっかけになってくださればいいなと思います。
そうして自動車のいわゆる「物理」について知ることは「こういう運転はしてはいけないな」とか「この運転は自動車に負荷がかかって燃費が悪くなるな」というように安全運転とエコ運転を知ることにもつながりますので、ぜひ一度ドライバーの操作と自動車の制御について学んでみてはいかがでしょうか?
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、初心者エンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。
今回のブログを作成したgibsonはinstagramも利用しておりますので、ぜひフォローもよろしくお願いします!
【instagramリンク】
↓↓
https://www.instagram.com/gibson_hobby/
参考
以下に今回のブログを作成するにあたって参考とした書籍を紹介します。

【初心者向け】ハイブリッド自動車ってなに?
皆さん、こんにちは!エンジニアブロガーのgibsonです。
今回のブログの内容は、「ハイブリッド自動車」についてです。

近年、街を走っている自動車を見てみるとリアに「Hybrid」と書かれたものを多く見かけます。また、トヨタ車で言うと、トヨタのエンブレムが「青」になっているものはハイブリッドであるということが一般的に知られていますが、最近街中で見かけるトヨタ車のエンブレムは大方青いエンブレムとなっています。
では、皆さんの身近に多く見かけるようになった「ハイブリッド自動車」ですが、そもそもハイブリッド自動車とは何なのでしょうか?
今回はハイブリッド自動車について自動車に興味が無いような方でもわかるようにご説明していきたいと思います。
今回のブログの構成は以下のようになっています。
それでは始めていきましょう!
1.「ハイブリッド」の意味
まず最初にハイブリッドの意味を調べて見ましょう。英単語帳などを見てみると「hybrid」(混ざった、雑種)と説明されています。
つまり、ハイブリッド自動車とは「何かが混ざった自動車」であることがわかります。
では何が混ざっているのでしょうか?
答えは「パワートレイン」です。パワートレインというとエンジンなどの出力機構とトランスミッションなどの動力伝達機構を合わせて呼ばれることが多いですが、実際ハイブリッド自動車では複数種の出力機構を組み合わせ、共通の動力伝達機構を用いてパワーをタイヤに伝えています。
ハイブリッド自動車の出力機構には「エンジン」と「モータ」の2種類を採用するのが一般的です。

ハイブリッド自動車とは、このようにエンジンとモータという異なる出力機構を併用していることから「Hybrid」自動車と呼ばれているのです。
2.エンジンとモータを併用する理由
ハイブリッド自動車は燃費が非常に高く環境に良い自動車として一般的に知られていることからもわかるように、エンジンとモータを併用する理由は「燃費に良い」からです。
ではなぜエンジンとモータを併用することで従来のエンジン自動車よりも燃費が良くなるのでしょうか?
まず一つが燃料の違いです。エンジンはガソリンをエンジン内部で燃焼させることで動力を得ています。このガソリンを燃焼させ自動車から排出される排気ガスには二酸化炭素などが含まれており、地球温暖化の原因であるといわれています。
それに対して、モータは動作するために「電気」があれば動作して力を発生させることができます。電気は自動車のバッテリなどに蓄電されておりそれを使用することでガソリンを消費せずに走行することが可能です。また、モータは電気で駆動しますがその際に有害な物質などは一切排出しないため、地球の環境にも優しいのです。


以上のことから、燃料を消費するエンジンよりも電気で駆動することのできるモータの方が燃費の面で有利であることがわかります。
今までの話を聞いていると自動車にエンジンは不要のように感じますが、なぜモータのみではなく、モータとエンジンを併用しているのかについてさらに詳しくご説明いたします。
3.エンジンとモータを併用する理由(もっと詳しく)
エンジンとモータにはそれぞれ得意・不得意があります。先ほどの話では燃費の面に関してはエンジンは不得意で、モータが得意ということになりますが、ほかの面に関して言うと少し違ってくるのです。
実はモータは高速走行が不得意です。また、モータに電気を供給するバッテリは効率自体は良いものの容量に限度があり長距離の走行も苦手となります。
それに対してエンジンは高速走行を得意とし、ガソリンは非常に高いエネルギー密度を持つことから少ない量でも爆発的な力を発揮することができます。このため、エンジンは長距離の走行を得意とします。
また逆のパターンでいうと、自動車の発進の際には「トルク」が必要であるというお話を以前のブログでさせていただきました。
ブログのリンクです!
↓↓
実はモータは低回転から最大トルクを発揮することができるため、信号が赤から青になった時などの発進が非常に得意です。
一方でエンジンは高いトルクを発揮するのに回転数を高める必要があるので、ガソリンを多く消費してしまいます。
このようにエンジンとモータにはそれぞれ得意・不得意があり、それぞれの得意な所を良いとこどりすることでより自動車の燃費を高めることができようになります。
また、ハイブリッド自動車の中にはモータで主に走行してエンジンはバッテリに電力を供給するための「発電機」として使用し、高速走行時や急加速時のような大きな力が必要な時のみエンジンまたはエンジンとモータで走行するような制御を行っている車種もあります。
4.まとめ
今回はハイブリッド自動車について基本的な内容を初心者の方でもわかるようにご説明させていただきました。
ハイブリッド自動車って燃費にいいことは知っているけど、なぜ燃費が良いのかは知らなかったような方への導入編としてまとめさせていただいておりますので、ぜひこちらのブログを読んで参考にしていただければと思います。
今回のまとめとしては、ハイブリッド自動車とはそもそも動力源がエンジンとモータの二つをハイブリッド(組み合わせ)しているためにそのように呼ばれています。
また、エンジンとモータと併用する理由としては、実走行時にお互いの得意な場面で使用を切り替えることで効率良く走行することができ、なおかつ走行距離を伸ばすことができるからです。
今後、ハイブリッド自動車から電気自動車へと徐々にシフトしていくことが予想されます。電気自動車は電気自動車で様々な問題を抱えていますが、それはまた別の記事でお話させていただきたいと思います。
それでは、今回のブログは以上となります。
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、初心者エンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。
【初心者向け】どうして自動車は走るのか【トランスミッション編】
皆さんこんにちは。エンジニアブロガーのgibsonです!
今回のお話は、以前投稿した「どうして自動車走るのか【エンジン編】」の続編となる「トランスミッション編」です。
前回のお話では自動車がエンジンから動力を得ていることについてお話させていただきました。
今回ではそのエンジンから得た動力を用いてどのように自動車を駆動(タイヤを回すこと)しているのかについてお話させていただきます!
今回のブログの構成は以下のようになります。
それでは始めて行きましょう!
前回のお話はこちらのブログを見てください!
↓↓
1.トランスミッションとは
まず最初にトランスミッションとはどのようなものなものなのかについてお話していきます。
トランスミッションとは「transmit(〜を送る、〜を伝える)」の名詞となり「伝達」という意味となります。
自動車においてトランスミッションの役割とは文字通り伝達を行うことなのですが、トランスミッションが伝達するのは「動力」になります。
トランスミッションはエンジンで発生した動力をタイヤに伝達する働きの一端を担っています。

さらにトランスミッションの役割としてもう一つ重要なのが「減速増トルク」と「増速減トルク」です。
まず、このトルクについてご説明していきたいと思います。
2.トルクとは
トルクとは、軸などの回転体の回転方向へ作用する力のことです。

また、自動車ではトルクの単位は(N-m)で表記されることから、「回転体に作用している力の大きさと回転中心から作用点までの距離の積」と表現することもできます。
前回のエンジンの記事でもご紹介したように、エンジンで発生した力はクランクシャフトと呼ばれる回転体によって回転する力に変換されます。そしてこの回転する力が最終的にタイヤに伝達されることで、タイヤが回転するようになっています。
このトルクが大きければ大きいほどタイヤは強く駆動し自動車を前へと進めます。トランスミッションはこのトルクが非常に重要になってきます。
3.トランスミッションの役割
トランスミッションはトルクをタイヤに伝達するだけでなく、トルクを増加させたり(増トルク)逆にトルクを減少させる(減トルク)代わりに回転数を増やす(増速)する役割があります。
トランスミッションには様々な種類があります。現在はシェア率が90%以上となっているAT(オートマティックトランスミッション)やCVT(無段変速機)、非常にレアな存在となってしまったMT(マニュアルトランスミッション)などがありますが、それらはすべてギアと呼ばれる歯車(CVTは機構上歯はありませんが笑)を組み合わせて構成されています。

ギアと呼ばれる歯車を組み合わせることでどのようにトルクの増加減、回転数の増加減が行われているのかについてご説明します。
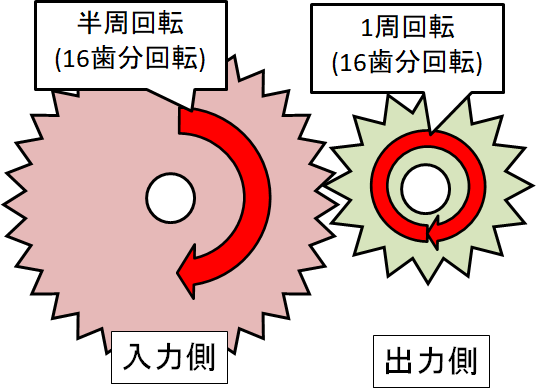
上図のように歯数がそれぞれ32と16のギアを用意して、歯数が32の大きい方を入力側、歯数が16の小さい方を出力側とします。
この時入力側のギアを回転させ、半周(16歯分)回転させます。するとこの時出力側のギアも16歯分回転することにより出力側のギアは1回転することになります。
このように、入力側のギアより出力側のギアの歯数を少なくすることで入力側より出力側のギアの方の回転数を大きくすることができます。また、逆に入力側より出力側のギアの歯数を多くすることで出力側のギアの回転数を小さくすることができます。
出力側の回転数を大きくすることで、同時にタイヤの回転数を大きくすることができます。これによって高速道路などの高速走行時にエンジン回転数を低く抑えることができ、結果ガソリンの消費量を抑えることで省燃費化を行うことができます。

さらに、入力側と出力側のギアの歯数を入れ替えると回転数が減少する代わりに、出力トルクは増加するようになります。

入力側のギアにエンジンから回転する力を与えると入力側のギアが回転を始めます。この時、入力側のギアは出力側のギアを接している箇所を通じてエンジンの力を出力側のギアに伝えようとします。
実際にはこの時に伝達される力はギア同士の滑りなどによって少し損失が発生してしまいますが、ほぼ等しい大きさの力が出力側のギアに伝えられることになります。このとき、先ほどのトルクの説明より、力の大きさが等しければギアの半径の大きさによってトルクの大小関係が決まります。ギアが噛み合うためには歯の大きさが等しい必要があり、つまり歯数はギアの半径に比例します。
よって、歯数の少ないギアから歯数の多いギアに力が伝えられるとき、半径の小さいギアから半径の大きいギアに力が伝えられることとほぼ同じと考えられます。伝えられる力の大きさはほぼ等しいので、半径の大きなギアの方がトルクが大きくなります。
このように、入力側よりも出力側のギアの歯数が多いとトルクの増加を行うことができます。また、逆に入力側より出力側のギアの歯数が少ないとトルクの減少を行うことができます。
以上のことをまとめると、入力側より出力側のギアの歯数が多いとトルクは増加する代わりに回転数が小さくなります。逆に入力がより出力側のギアの歯数が少ないとトルクが減少する代わりに回転数が大きくなります。
4.トルクを変化させる理由
自動車の駆動にはトルクが非常に重要です。自動車を発進させたり加速させるには自動車に働く慣性モーメントが働いているため、それに抵抗するため大きなトルクが必要になります。また、エンジンは特性上大きなトルクを発生させるために回転数を高める必要があります。エンジンの回転数を高めるとガソリンの消費量が多くなってしまうため燃費が低下してしまいます。
この問題を解消するため、トランスミッションによってエンジンの出力トルクをさらに増加させる減速増トルクを行うことで発進時に必要なトルクをより低いエンジン回転数で取得することができます。
また逆にタイヤが高速回転する必要がある高速走行時などではトルクよりも回転数が必要であるため、低いエンジン回転数でもタイヤを高速回転できるように増速減トルクを行います。
実際の自動車では発進や加速時にはより出力ギアの歯数が多い組み合わせである1速や2速のような低速ギアが選択され、逆にトルクが不要で大きな回転数が必要である高速走行時には出力ギアの歯数が少ない組み合わせである5速や6速、車種によっては8速や10速のような高速ギアが選択されます。
5.まとめ
ここまでトランスミッションの役割やトルクの増加減、回転数の増加減についてご説明してきました。
トランスミッションの役割はエンジンの回転数や出力トルクを走行状況によって増加減することです。またなぜそのようなことを行う必要があるのかというと、「省燃費」を実現するためになります。また、同時に運転時のドライバーの負担を減らすこともできます。
自動車は発進や加速を行う時と、高速道路などを走行するときでは求められるトルクや回転数が異なります。発進や加速時には大きなトルクが必要で、逆に高速走行時にはタイヤの回転数を大きくするために出力ギアの回転数を大きくする必要があります。
これらの走行状況によって自動車の出力を変化させるためにトランスミッションは用いられています。
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、初心者エンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。
【初心者向け】組み込みエンジニアとはなになのか?
皆さんこんにちは、エンジニアブロガーのgibsonです。
今回のお話は、私達の便利な生活を支える「組み込みエンジニア」とは一体なになのか?どういうことをしていてなぜ私達の生活が便利になるのかについて、組み込みエンジニアを知らない初心者の方にわかりやすいように説明していきたいと思います!
今回のお話は以下の様に構成されています。
それでは初めていきましょう!!
1.組み込みエンジニアとは
まず組み込みエンジニアの「組み込み」とは何なのでしょうか?
組み込みエンジニアが「組み込み系」と呼ばれる所以は開発しているソフトウェアの種類によります。組み込みエンジニアが開発するソフトウェアは家電や自動車、スマートフォンなどのいわゆる「ハードウェア」に内蔵されている「マイコン」に直接書き込まれています。

このように「マイコン」と呼ばれるハードウェアを制御するために必要なコンピュータにプログラムを直接書き込む(組み込む)ことから組み込みエンジニアと呼ばれています。
あまり機械に詳しくない方は意識せずスマホや自動車を操作、運転しているかもしれませんがこれらの製品の中にもコンピュータが内蔵されており、そこにプログラミングされた制御プログラムを介して私達は操作を行っています。
組み込みエンジニアとは、このコンピュータに内蔵されたプログラムを開発する技術者のことをいいます。
今までの説明のなかで「ソフトウェア」と「ハードウェア」が出て来ましたが、それらの違いについてご説明します。
・「ソフトウェア」
ソフトウェアとはアプリやOSの様に、私達がスマホなどを操作ためのプログラム部分になります。つまり、ソフトウェアとは私達が手に触れることができない物なのです。
例えば、「LINE」のようなアプリケーション使っているとき、文章の送信ボタンを押してもすぐに文章が相手に送られるわけではありません。

前提として、LINEのようなコミュニケーションツールで送信した情報はサーバーを経由して相手の端末に送信されます。さらに情報を送信する「送信ボタン」を押すと、まずアプリのソフトウェアがスマホのマイコンに対して情報の送信を依頼します。さらにその依頼を受けたマイコンがスマホの通信関連部品に電気信号を送ることで通信関連部品という「ハードウェア」を操作します。

普段私達がLINEを使って友人に文章を送信するとき、実はアプリケーションとスマホはこのような動作を行っていたのです。
・「ハードウェア」
続いてハードウェアとは、ソフトウェアのような触れることが出来ないものとは対象的に私達でも触れることができるものです。さらに詳しく言うと半導体デバイスや電子回路を用いて構成されているものがハードウェアとなります。
スマホで言えば、スクリーンやカメラ、内部ストレージなど物理的に触れることができるものがハードウェアです。
自動車で言えば、電子制御部分に使用されているモータ部分が組み込みソフトウェアで制御されているハードウェアになります。
2.組み込みソフトウェア
組み込みエンジニアがハードウェアを制御するために開発するプログラムが「組み込みソフトウェア」といいます。この組み込みソフトウェアとは先ほど説明したように、スマホや自動車に搭載されたコンピュータの中に書き込まれています。
この組み込みソフトウェアによって、スマホや自動車、さらにはテレビや冷蔵庫のような家電製品のハードウェアを安全かつ便利に動作するように制御します。

自動車を例とすると、例えば最近自動車で話題となっていることと言えば「自動運転」や「運転支援機能」ですよね。
最近の自動車では「運転支援機能」が標準装備されているものが一般的となってきました。運転支援機能の「キープレーンアシスト」を例とすると、まずは自動車に取り付けられたカメラが前方の状況を撮影します。カメラが撮影した映像を元データとして、自動車に搭載されたコンピュータが映像の中から白線の位置を検出します。
コンピュータが白線と自車の位置を特定し、自車が走行車線を逸脱しそうになると、スピーカーやメータ付近のスクリーンをドライバーに対して警告を出すように制御します。さらに、車線を逸脱しないようにハンドルを制御します。

年々自動車における電子制御の割合は増加しており、今やほとんどのハンドルやブレーキ、エンジンやトランスミッションなど様々な部品が電子制御されており、その一つ一つがマイコンの組み込みソフトウェアによって制御されています。
自動車のみならず家電製品などにおいても電子制御が進んでおり、今や組み込みエンジニアの需要は非常に高まっています。
3.まとめ
ここまで組み込みエンジニアとは何なのか?組み込みソフトウェアとはどのようなものなのかについてご説明してきました。
組み込みソフトウェアとは電子制御が行われているものすべてに対して開発がされており、スマホや自動車、家電製品など様々なものが今や電子制御されています。組み込みソフトウェアによってハードウェアの動作が制御されています。組み込みソフトウェアの品質で最も重要なことは安全と便利さであり、ほとんど電子制御によって動作している昨今の製品については組み込みソフトウェアの品質そのものがその製品自体の品質に影響します。
組み込みエンジニアとは、製品をどのように制御するか、どのように制御すればユーザーの要求に応えられるか、ユーザーが安全に製品を使用することができるかを日々検討し、ソフトウェアの開発を行っています。
組み込みエンジニアの開発努力によって、日々の私たちの便利で快適、安全な生活が保障されているということです。
今回は初心者の方にもわかりやすいように情報を整理させていただきました。万が一内容に間違いなどがございましたら、コメントなどでご指摘の程宜しくお願いいたします。
今回の内容は以上となります!
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、初心者エンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。
【初心者向け】自動運転の基礎知識として知っておきたいこと!【後半】
皆さんこんにちは、エンジニアブロガーのgibsonです。
今回お話するのは、近年自動車産業などでよく耳にする「自動運転」についてです。特に今回のブログでは自動車運転の知識の中でも、これから自動運転について学んでいきたい方や、自動運転に興味がある方向けに、難しい技術やワードなどではなく
自動運転の概念として、これを知っておくといいかも
といった初心者向けの内容になります。
以下、今回のブログの内容の目次となります。
- 自動車運転とは
- 自動運転の現状 ←前半までの内容となります。
- 自動運転の実現方法
- 自動運転の課題
- 自動運転の今後 ←後半では最後までご紹介します!
また、今回のお話は前回のブログの続きで「後半」となっていますので、まだ前回の内容を見ていないという方は先に下のリンクから「前半」を見ていただくことをおすすめします。
それでは初めて行きましょう!
・自動運転の実現方法
前回のブログでは自動運転の現状にて、レベル3の自動運転自動車がリリースされそうであるというところまでお話ししました。そして、自動運転の基本的な開発については「すでに完成している」というのが自動車メーカーの意見です。
というのも、自動車がレベル5クラスの自動運転を行うためには、私たちが普段自動車を運転するときと同じような「認知」と「判断」という運転プロセスを自動車自身で行う必要があります。
では、自動運転に必要なそ「認知」と「判断」とはどのようなことを行うのかについてお話していきます。
・「認知」
私たちが自動車を運転しているときは常に前方の視界から道路状況や車両情報、人が歩いていないかどうかなどの情報を入手しています。
また、自動車を運転しているときに「今どこを走っているのか」という現在位置の特定(自己位置推定)も認知プロセスの一環になります。
例えば、「信号が赤になった。」や「横断歩道に人が歩いている。」、「信号が青に変わったが、前方の自動車はまだ発進していない。」のように、普段私達が運転を行う際には様々な情報を基本的に目を通して入手し、その情報を元にどのように自動車を運転するのかを「判断」しています。
さらに、「〇丁目の交差点を通過したので、次の交差点で右折する。」という位置情報も同時に入手しています。

つまり、「認知」とは自動車を運転する際の動作決定、判断を行うための情報を集めるプロセスとなります。
自動運転を行う際は当然、この道路状況などの情報はドライバーではなく、自動車自身で入手しなくてはいけなくなってきます。その際に使用されるのが、「カメラ」や「センサー」などとなってきます。また、自動運転には5Gの高速通信を用いた通信機能の向上によって、「他の自動車や街中のカメラやセンサー、信号機」などと通信を行い連携して情報を入手するようになります。
これらの自動車の通信に関してはCASEの「C(コネクテッド)」の分野にあたります。

実際カメラを用いた道路状況の認知に関してはレベル2程度の運転支援システムにおいて自動車の前方や後方、あるいはドアミラーにカメラが搭載され、そのカメラによって周りの状況を認知することで走行レーン変更支援や駐車支援などを行っています。
自動運転を行うためには自車の位置を特定する必要があると先ほど述べました。一般的に皆さんが想像するのはGPSによる情報に基づいた自己位置特定だと思われます。

しかし、GPSには数mから数十mの誤差が生じる可能性があることと、通信状況の悪いところでは正確な位置を測定できないという欠点があります。その欠点を補うために、センサーを用いた自己位置推定を行います。その時に用いられるセンサーを「LiDAR(ライダー)」といいます。

上記にAmazonで簡単に探したROSなどのロボットに使用されるLiDARのリンクを添付させていただきました。 このようなレーザーを用いたセンサーが自動車の上部に取り付けられています。ちょうど先ほどのいらすとやの挿絵みたいな感じになっています。
そして、このLiDARでは赤外線などのレーザーを用いた「3次元情報」の入手が可能となります。3次元情報とは「周囲の建物や道路の起伏、前後の車両や対向車両」などといった周囲の状態を含んだ地形情報、3次元地図のこととなります。

LiDARにより自車の周辺の3次元情報を入手し、その情報とあらかじめ作成された3次元地図とを比較し、一致した箇所の中心に自車がいると推定することで自己位置推定を行うことができます。
下にロボットの自己位置推定を行ったmathworks社の参考動画を掲載しておきます。興味のある方は一度ご覧になってください。
・「判断」
「認知」のプロセスで得た道路状況や、進路の状況をもとに自動車をどのように走行させるのかを決定します。
さきほど「認知」のプロセスで少し触れましたが、例えば、「信号が赤になった。から、ブレーキをかけ自動車を停止させる。」や「横断歩道に人が歩いている。から、ブレーキをかけ横断歩道の手前で停止する。または、徐行する。」というように、「判断」のプロセスでは「認知」のプロセスで得た情報をもとに「どのように自動車を操作するのか」を決定する必要があります。
しかし、一言で言ってもこの判断は僅かな道路状況の違いで異なる判断をしなければならない事があります。
つまり、一問一答のように「このときは絶対こうしなければならない。」というような方程式が例外となるイレギュラーな対応を行わなければならないときが出てくるのです。
このような複雑な判断について、すべてプログラムでロジックを組み、すべての判断パターンを網羅する事は不可能に等しいです。そのためこのような判断には「AI」を用います。様々な自動車の過去の走行データなどを集めた「学習データ」から、現在の道路状況などに最も適した走行をリアルタイムで判断します。このように様々な過去のデータを「教師データ」として、それをもとに今回のパターンではどのようにするのが最も適切かを判断する学習方法を「機械学習」や「深層学習(ディープラーニング)」などといいます。
以上の2点が私達の自動車の運転と「自動運転」の違いとなります。
「認知」と「判断」のプロセスについてまとめると、「認知」では「カメラ」や「センサー」のような周りの情報を入手し、得られた画像データに何か映っているのかを「AI」を用いた画像認識を行うことで「人」や「信号」、「車両」などを検出します。
さらに「判断」では「目的地までの進路」、「認知で検出した道路状況」などの情報を元に自動車をどのように操作するのかをコンピュータが決定します。
そして、これらの各プロセスの開発についてはすでに完了しているのです。現在は開発から改良の段階にステップアップされ、より確実に認知を行い、より正確な判断が行えるように画像認識や機械学習の研究が進められています。
自動運転業界への就職、転職を考えておられる方は画像認識や機械学習に対する知識を持っておくといいと思われます。
・自動運転の課題
自動運転を実現するための準備はもう完了と言ってよいところまで来ていると思います。
しかし、実際に自動運転が身近になるのはまだ少し先のようです。その原因として二つ挙げられます。
・「道路などの外的要因」
まず一つ目が「道路」です。まず前提として自動運転を行うには先ほど説明したように「認知」と「判断」を行う必要があります。
しかし、その「認知」を行うためにカメラやセンサーを使用するのですが、日本の道路で車線の誤検出が起きにくいような見通しが良く道路幅が広い綺麗な道路は高速道路のような高規格道路のみであり一般道では場所によって道路の状態が悪いことから認知が正確に行えないような場所も存在します。また、自動運転の試験を一般道で行うとなると周りに一般の方が運転している中で「安全」を確保した試験を行わなければなりません。日本の道路の綺麗な都市部では交通量が多く、逆に地方の道路では道路状態が悪いためなかなか自動運転の試験を行える環境がないのが現状となっています。
中国などの国土の広い海外では、自動運転を試験するための土地が広大であるため、自動運転の試験データがとりやすく、その試験データをもとに機械学習を行うために自動運転の精度の向上が行いやすいのです。
一方日本では先述した道路状況などからなかなか自動運転の試験データがとりにく炒め、諸外国と比較して自動運転の技術の向上が進みにくいという現状があります。
・「認知と判断の精度」
もう一つの要因は、自動運転の精度そのものにあります。現在カメラやセンサーを用いた画像認識の精度の向上に関して様々な研究などが行われ、その制度は非常に高くなってきています。
しかし、自動運転の際には時速数十キロで走行している状態の画像を用いて正確に道路状況や障害物の検出を行い、さらに人の安全を確保するためにその制度は100%でなければならないと考えると、まだ画像認識の精度が十分に高いとは言えません。
上記に実用化された無人自動運転タクシーとホンダのレベル3の自動運転自動車に関する動画のリンクを掲載させていただきました。
やはり、自動運転を行うことができる状況に制限があり街中や渋滞などの低速走行のみに対応しているようです。
以上より、道路状態やカメラやセンサーの検出精度が完全自動運転を実現するための課題となっていることがわかります。
・自動運転の今後
先ほど動画のリンクを貼らさせていただきましたが、確実に自動運転が身近な存在になる日は近づいてきています。
2019年には道路交通法が改正され自動運転自動車が公道を走行してもよくなりました。(https://www.npa.go.jp/bureau/traffic/selfdriving/trafficact.pdf,参考:自動運転|警察庁Webサイト)
今後は都市部と高速道路など限定で自動運転が普及していくと思われます。先ほど説明したようなLiDARを用いた自己位置推定にはあらかじめ3次元地図がなければ、自己位置推定が行えません。そのため、全国で自動運転を行うためには地図データの生成が必要となります。まずは都市部や高速道路の3次元地図から生成されていくと思うので、地方で自動運転ができるようになるのはそれからになると思います。
また、自動車同士の通信や信号との協調制御を行うための5G環境の整備、自動車がカメラやセンサーから入手した機械学習の教師データとなる莫大な情報を集めるためのクラウド、サーバーの準備、車両通行帯が引かれた道路の整備など自動運転を行うための環境構築が必要となってきます。これらの環境が整って初めて完全な自動運転が私たちの身近になってきます。
また、今後は今までバスやタクシーなどでしか交通手段のなかった地方の方向けの自動運転による交通サービスが展開され、近年問題となっている公共交通機関の運転手不足、および高齢化への解決策となります。
これらの従来の公共交通サービス以外の「新たな交通サービス」が続々と展開され、「自動運転」のほかに「カーシェアリング」や「自動車乗り合いサービス」のような今までの交通手段に新たな選択肢が増えてきます。
このようなサービスのことを「MaaS(Mobility as a service)」といい、自動運転業界と同じぐらい注目されている業界となりますので、ぜひ一度調べてみてください!
・まとめ
今回は自動運転のお話ということで、お話の内容が非常に盛沢山となってしまいなかなかまとまらないブログとなってしまいましたが、何とか自動運転の現状などについてお話しできたかなとおもいます。
まとめとして、自動運転は現状レベル3までの製品化ができており、自動運転についての開発については完成しています。
完全な自動運転を実現するためには「認知」と「判断」について100%の精度で実行する必要があり、そのためにはカメラやセンサー、AIの精度の向上が求められます。さらに、道路や通信インフラの整備などを実施する必要があります。
今日本は「自動運転事業」を国のプロジェクトとして国主体で実現に向けて取り組んでいます。自動運転を実現するための障害は様々ありますが、実現自体はそう遠い未来の話ではないと思います。さらに、MaaSと呼ばれる新たな交通サービスの展開も始まり、今後移動手段の選択肢として非常に多くのカードが用意されるようになってきますのでぜひ皆さんも今後の自動運転の展開にご注目ください!
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、新卒1年目のエンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。
【初心者向け】どうして自動車は走るのか【エンジン編】
皆さんこんにちは。エンジニアブロガーのgibsonです。
今回の話題は、自動車のメカニズムについてとなります。
自動車はどのような仕組みで動いているのか、私たちがアクセルやブレーキ、ハンドルなどを操作するとき、自動車のなかではどのようになっているのか。などについて初心者の方でもわかりやすいような説明を心がけていきます。
今回の話題の目次は以下の通りです。
- エンジンとはなにか
- エンジンの構成
- エンジンの4工程(4サイクル)
それでは早速始めていきましょう!
1.エンジンとはなにか
普段私たちが乗っている自動車のエンジンに興味がある人はほとんど少数で、自分が乗っている自動車のエンジンを見たことがないという方もいらっしゃるかもしれません。
エンジン自体は18世紀から19世紀にイギリスで起きた「産業革命」あたりから使用されるようになってきました。最も、昔のエンジンは俗にいう「蒸気機関」と呼ばれる熱した水の蒸気の力によって車両などを動かしていました。
現在私たちが乗っている自動車のエンジンは「内燃機関」と呼ばれ、エンジン内部で空気に混じった「ガソリンや軽油」などの燃料を爆発させ、その熱によって膨張した気体(空気)によって自動車は動いています。
中学生か高校生の時に理科や物理の時間に気体の状態方程式や熱力学について学んだことのある方は、すぐに理解できると思います。また、忘れてしまっている方でも、感覚的に熱された気体は膨らむと理解できると思います。
少し詳しく説明します。
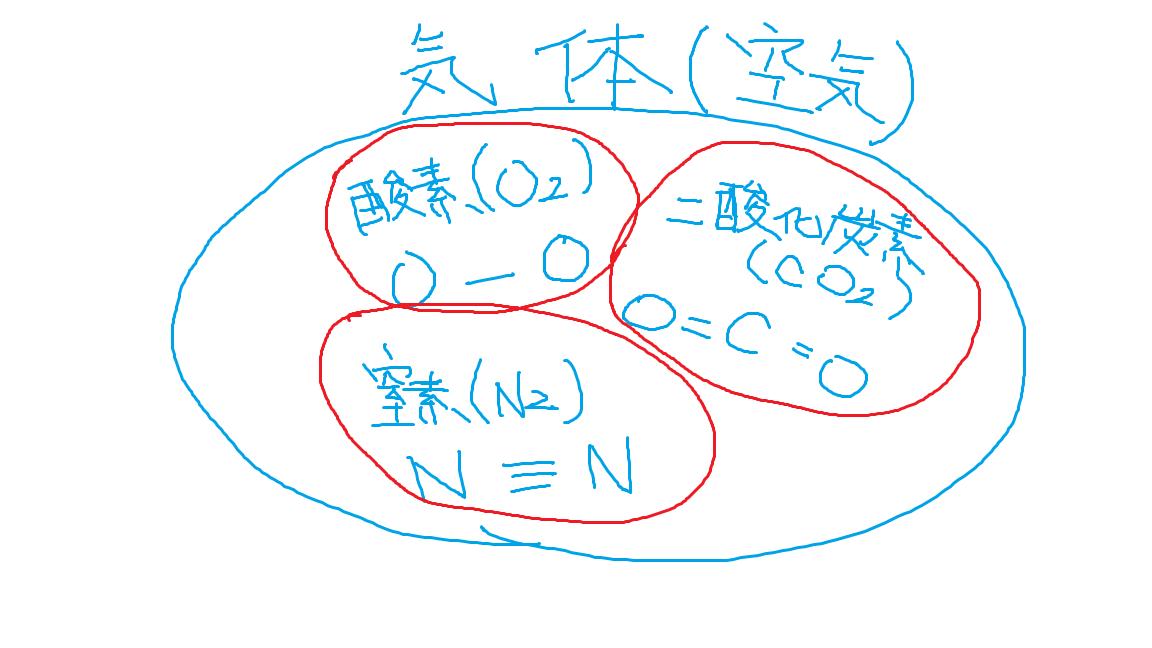
空気を例とすると、空気中には「酸素」、「二酸化炭素」、「窒素」など様々な物質が分子として存在し、それらの分子によって構成されています。
そして、同一気体の場合、気体の体積(大きさ)は分子の運動量によって決まります。
それを一般化した方程式を「気体の状態方程式」といいます。
ここで、「Pが気体の圧力」、「Vが気体の体積」、「nが気体の物質量」、「Rが気体定数」、「Tが気体の温度」を指します。
この気体の状態方程式について説明するとかなり本題から逸れてしまうので今回は省略します。先ほど気体の体積は運動量に影響すると説明しましたが、気体の運動量は気体の温度によって変化します。つまり、気体の温度が高いと気体の運動量も大きくなるということです。
そして運動量が高いとはどういった状態のことを指すのかというと、気体の運動量が高いと、気体を構成する分子の運動が激しくなります。
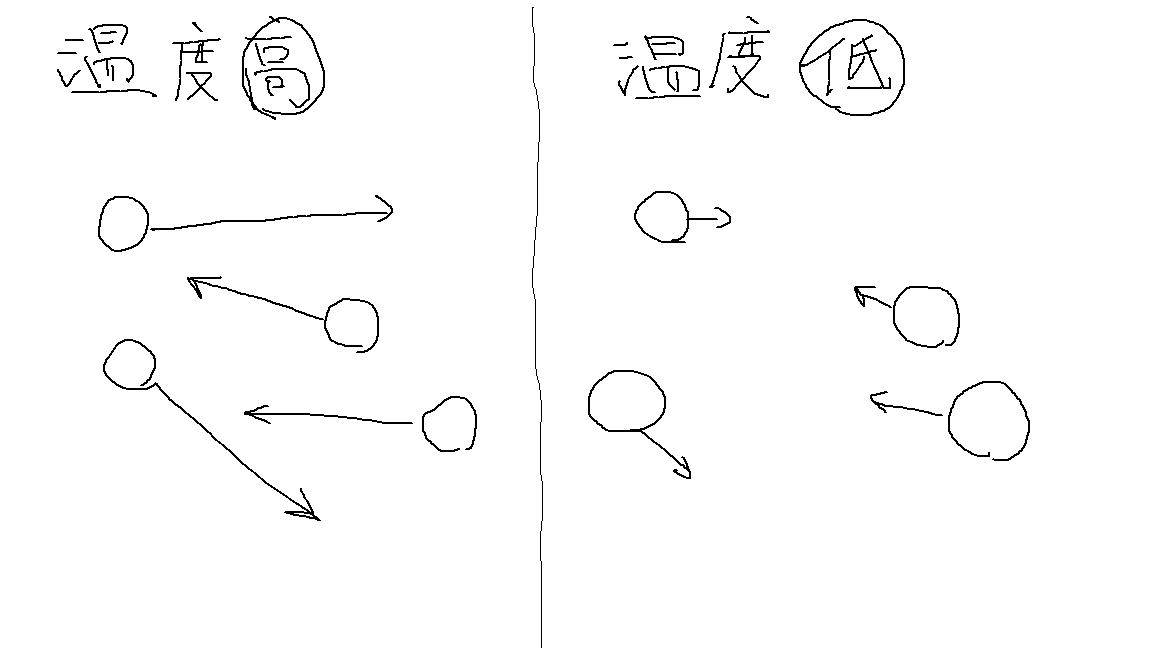
そして、分子の運動が激しくなると、分子の動く範囲が大きくなるため、結果として体積(大きさ)が大きくなるということです。
この気体の温度を高くして気体を膨張させるという気体の原理を利用して自動車は走っています。
2.エンジンの構成
次は、エンジンの構成についてお話します。
まず、エンジンはガソリンを燃焼させる「シリンダーブロック」と、その蓋となる「シリンダーヘッド」が大半を占めています。

シリンダーブロック内では、上記の写真の丸い穴の中で燃料を圧縮し爆発させています。そのため、シリンダーブロックとその蓋となるシリンダーヘッドにはその爆発に耐えるための高い耐久性が求められます。
次に燃料の爆発からどのようにして自動車を動かしているのかについてご説明します。
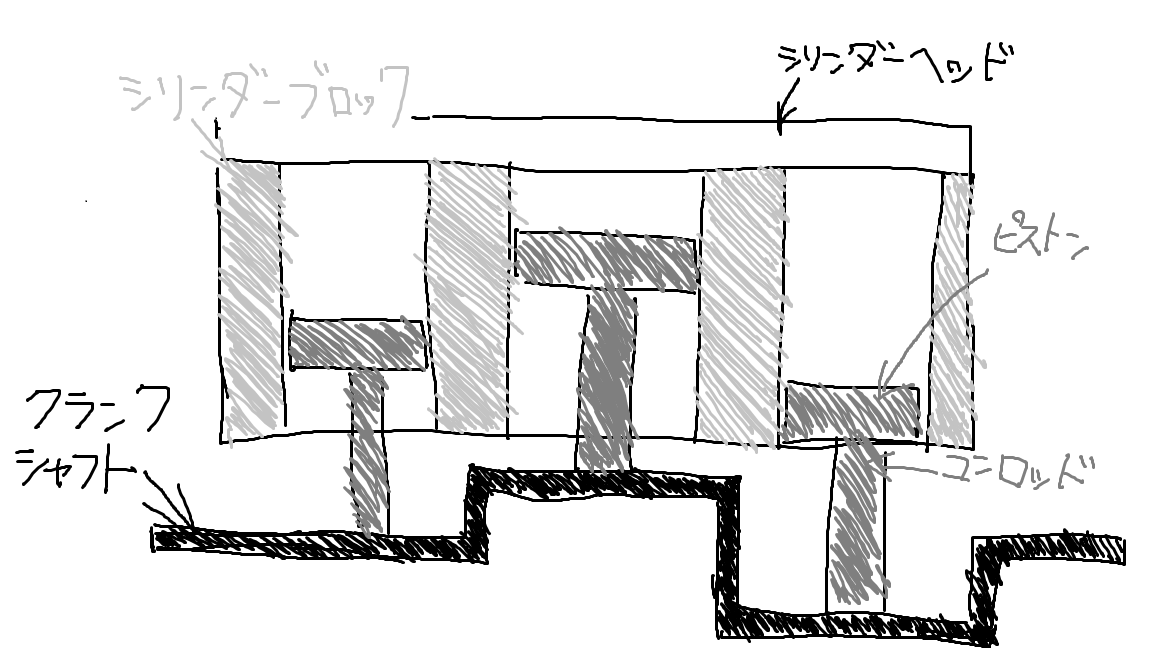
先ほど説明したシリンダーブロックの中に、「ピストン」と「コンロッド」と書かれたものが入っているのが確認できると思います。
ピストンはガソリンの含まれた空気を圧縮するためにシリンダーの大きさに対してほぼぴったりとなるように設計されています。
このピストンは上昇することでシリンダーブロック内の燃料を圧縮し、燃料が爆発すると下降します。
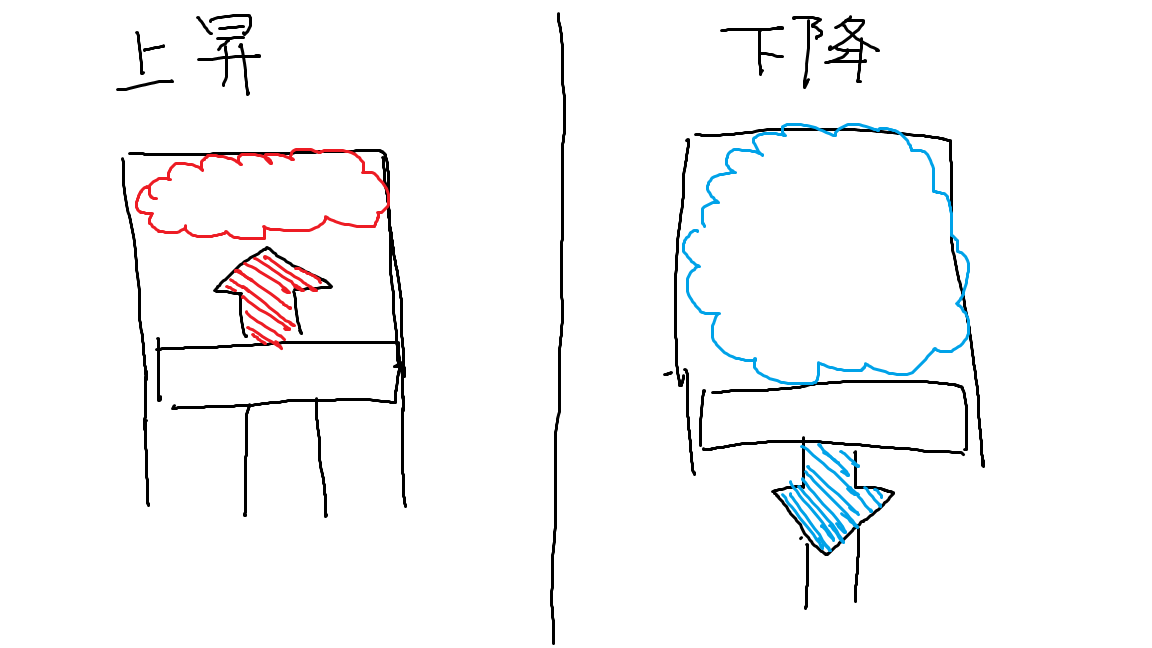
このようにピストンは「上下運動」を行います。さらに先ほどの図にあった「クランクシャフト」によってピストンの上下運動が「回転運動」に変換されます。
イメージとしては自転車をこぐときの「ペダルがピストン」で、「ペダルと車体をつなぐ軸がクランクシャフト」といった感じです。
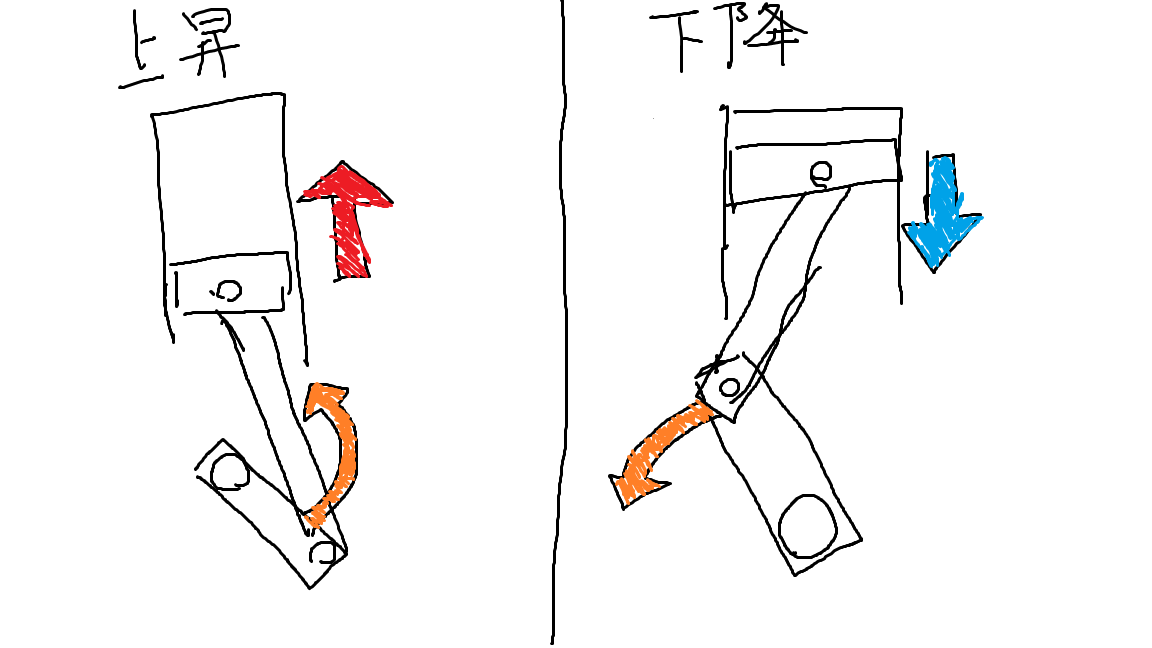
図のように、クランクシャフトの位置によってピストンが上昇したり下降したりします。さらに、ピストンとクランクシャフトをつなぐコンロッドが「関節」的な動作をしてくれるおかげで、ピストンの「上下運動」をクランクシャフトの「回転運動」へと変換してくれています。
このようなピストンの上下運動にて、いったいどのタイミングで燃料を爆殺させ動力を得ているのでしょうか?
その答えは、エンジンの4サイクルにあります。
3.エンジンの4工程(4サイクル)
まず最初に、私たちが乗っている自動車に搭載されているエンジンは「4サイクルエンジン」と呼ばれます。
この4サイクルとは何かというと、「燃料を取り込み爆発させ動力を得るための工程」のことを指します。
その工程にはどのようなものがあるのかを説明します。
一般的に、4サイクルの工程は「吸入」⇒「圧縮」⇒「燃焼(爆発)」⇒「排気」に分けられます。
・「吸入」
まず「吸入」の工程では、自動車の外部から空気をエンジンのシリンダー内に取り込みます。またその際に「インジェクター」と呼ばれるガソリンを噴射するところから霧状の燃料を噴射し吸入する空気に混ぜます。
・「圧縮」
「吸入」の工程でシリンダー内に取り込んだ燃料の混ざった空気を、この工程でピストンの上昇によって圧縮します。
また圧縮する際に気体の温度が上昇します(気体の状態方程式より)。このとき気体の温度が上昇することで霧状だった燃料が気体へと変化します。
・「燃焼(爆発)」
「圧縮」工程にて高温、高圧状態になっている燃料にシリンダー内の上部にある「スパークプラグ」より火花を発し点火することで燃料を爆発させます。
爆発により生じた力によってピストンを押し下げ、クランクシャフトに回転する力を加えます。
・「排気」
燃料を爆発させたことによって発生した燃焼ガスを車外へと排出します。
以上の工程によってエンジンは燃料の化学エネルギーを自動車の運動エネルギーへと変換しています。
またこの工程は4サイクルであり、「吸入」と「燃焼(爆発)」のときはピストンが下降し、「圧縮」と「排気」のときはピストンが上昇します。つまり、4サイクルを行うためにクランクシャフトは2回転することになります。
さて、以上のようにエンジンで発生した力をクランクシャフトで回転する力に変換し、さらにタイヤへと回転する力を伝えて自動車は走ります。
今回は自動車のエンジンがどのようにして自動車の走る力を生み出しているのかを説明してきました。
次回は、エンジンの力をタイヤまで伝達する「トランスミッション」についてのご説明を行いたいと思います。ぜひ楽しみにしていてください。
また、今回の内容で疑問に思ったことなどございましたら、コメントなどでお知らせください。より詳しい説明を行う機会を設けたいと思います。
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、初心者エンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。
【レビュー】SONY Xperia1Ⅱのカメラ性能検証
皆さんこんにちは、エンジニアブロガーのgibsonです。
今回の話題は、先日購入したSONYのXperia1Ⅱについて、
実際に景色を撮影しその写真をもとに、Xperia1Ⅱのカメラ性能を評価していきます。
今回のブログの構成は以下のようになっています。
- Xperia1Ⅱのカメラのスペックについて ←今回はここまで
- 実際に撮影した写真を用いたカメラ性能評価
- Xperia1Ⅱのカメラの特徴
カメラのスペック説明の前に用語説明があるので、初心者の方でもわかりやすいようにしています。
それでは早速始めていきましょう!
1.Xperia1Ⅱのカメラのスペックについて
まずは、Xperia1Ⅱのカメラのスペックについて公式でどのように展開されているのかについて調査します。
Xperia1IIのカメラの特徴で特筆すべき点は「3つ」のカメラレンズです。Xperia1IIには3つのカメラレンズが搭載されており、「超広角」、「望遠」、「標準」とどのようなシーンで写真を撮るかという状況によって適材適所で使い分けることが可能となっています。

まずは、これらのカメラレンズについてご紹介する前に、カメラの特徴を表す要素についてご説明していきます。
レンズの特徴として「有効画素数」、「焦点距離」、「F値」というものがあります。
これらはそれぞれ簡単に説明すると、「写真のきめ細かさ」、「被写体の拡大比」、「光の集まり具合」という風になります。
それだけではよくわからないと思いますので、さらに詳しく説明していきます。
- 「有効画素数」
まず最初に、このような「画質」の話で「解像度」という単語を聞いたこともある方もいらっしゃるかもしれませんが、本質的に解像度も画素数も同じものです。
先ほども述べたように、有効画素数とは写真のきめ細かさに影響するのですが、その理由を知るためには写真がどのようにしてデジタル表示されているかを知る必要があります。
もともと、私たちが普段目にするような景色などはアナログの世界です。少し専門的な表現をすると、目に入ってくる景色などの情報は「連続的」であるといいます。
一方、スマホなどで写真を撮影しその写真を画面上で見るとき、一見普段私たちが見ているような景色と同じような感じがしますが、それはあくまでスマホなどのデジタルデバイスを通じて表現された「非連続的」または「離散的」な情報となります。
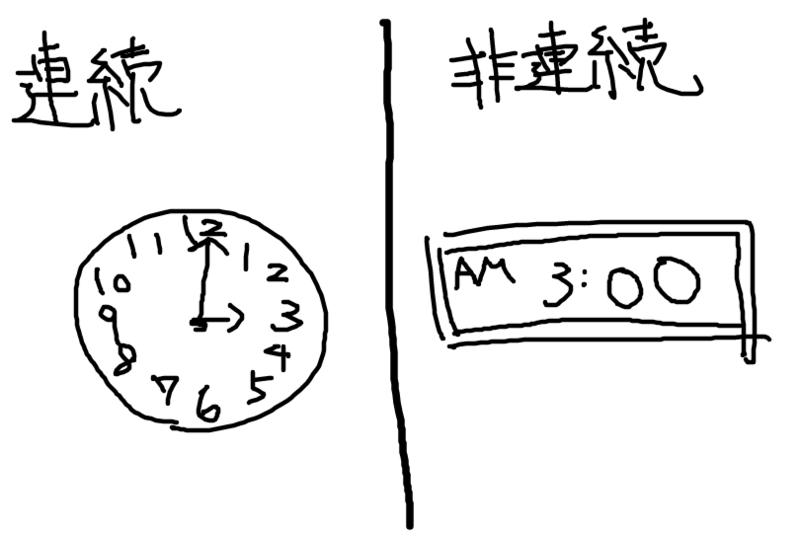
拙い絵ですが、連続の方では3:00と3:01の間も時計の針が動いているため、時間の流れが目で見て確認できます。
一方、デジタル時計の方ではデジタル時計の最小表示単位が秒までなので、それ以上細かい時間の流れはわからない(1秒、2秒、3秒.....)。これが連続と非連続の違いになります。非連続とは連続の世界を数字で表現するために最小単位で切り取ったものの状態のことなのです。
いきなりわけのわからない話になってしまいましたが、つまりは私たちが目にする景色とスマホの写真は同じにように見えて実は少し異なっているのです。
なぜそのようなことになるのかというと、アナログの景色をスマホのカメラを通じて撮影する際にデジタルの情報に変換するからです。
例えばこのような景色があるとします。
毎度のことながら絵が下手すぎてびっくりしているのですが、これは「富士山」です。
「これは富士山です。」
このようなアナログの景色をデジタルで変換するためにはまず写真の最小単位で切り出す必要があります。
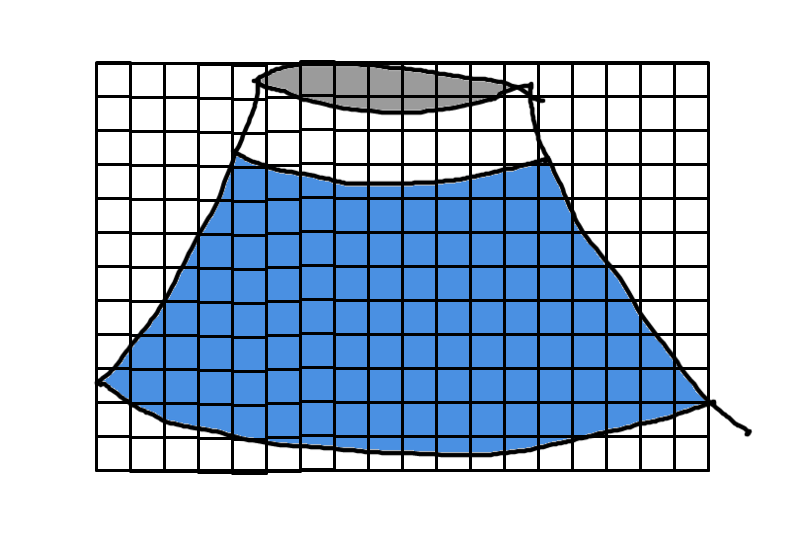
例としてこのように切り出すとすると、よく見ていただくと最小単位の四角の枠の中に富士山の輪郭と背景の白色と、富士山の青色が入ってしまっているのがわかります。
ただし各枠内の色は最小単位で一つの色しか表現できないため、デジタル情報に変換することで写真が次のようになります。
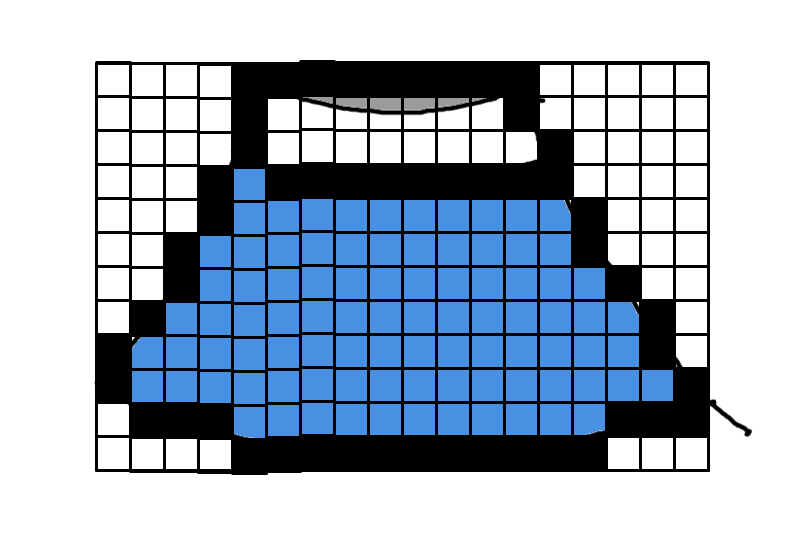
正直な話、正確には少し違うのですが今回はこの程度の理解で十分です。
皆さん、このようなイラストに見覚えはないでしょうか?
そうです。昔のマリオのような「ドット絵」みたいになりましたね。
結局スマホの写真はこのドットが非常に細かくなったドット絵と同じです。このドットのことをピクセルと表現することもあります。(余談ですが、2Dではピクセルといい、3Dではポリゴンといいます。)
スマホのようなデジタル写真はこのピクセルの集合によって表現されているのです。そして、このピクセルが写真にどれぐらい集まっているのかを「画素数」といいます。
写真の大きさが一定だとすると、画素数が大きければ大きいほどこのピクセルの大きさ、つまり写真の最小単位が小さくなり、アナログの景色をより詳細に表現することができるようになるのです。
画素数が大きいと写真の画質が良くなるのはこういう理屈からになります。そして、先頭に「有効」という文字がついているのは、本来もっと画素数が大きいのですが、正当なスペックとして評価できる。つまり、ピクセルとして十分に機能できているものを有効画素数と呼んでいるのだと思います。
- 「焦点距離」
続いては焦点距離についてのご説明です。皆さん小学生か中学生ぐらいのときに理科の授業でろうそくの前に凸レンズを置いて、スクリーンに映すと像の大きさが大きくなったり小さくなったりする授業を受けた覚えはないでしょうか?

景色の光をレンズに通したときに、すべての光が集まる距離を「焦点距離」といいます。
焦点距離は近ければ近いほど被写体が小さく写るので近接撮影に向いています。逆に遠いと被写体が大きく写るので望遠撮影に向いています。
F値とは絞り値のことを言います。ぶっちゃけ私自身そこまでカメラには詳しくないため、調べた内容になるのですが、カメラには撮影の際に景色の光の集め具合を調整するカバーがあり、そのカバーの開き具合でレンズに入ってくる光の量を調整しています。
このカバーの開き具合をF値で表現しています。また、絞り値といわれるのは、そのカバーの開き具合を調整するときに、カバーを絞るように回すことで開き具合が調整できるためです。
このF値は絞りを開くと小さくなり、逆に絞りを絞ると大きくなります。
F値は写真を撮る際の背景の「ぼやけ」に影響します。F値が大きければ背景はぼやけにくくなり、F値が小さければ背景はぼやけやすくなります。
また、F値によってレンズに入る光の量も変わります。F値が大きければ光の量を抑えることができるので、明るい場所でも被写体を鮮明に写すことができます。
逆に、F値が小さければ、レンズに多くの光が入ることになるので暗い場所でも被写体を明るく写すことができます。
写真を撮るシーンに合わせて、このF値をうまく活用することで夜間の撮影などでもきれいに写真を撮ることができるようになりますね。
さて、ここからが本題です。Xperia1IIには3つのレンズ(「標準」、「望遠」、「超広角」)が搭載されており、それぞれに先ほど説明した「有効画素数」、「焦点距離」、「F値」が設定されています。
- 「標準」
Xperia1IIのレンズで最もスタンダートなレンズです。
「有効画素数」:約1220万画素
「焦点距離」:24mm
「F値」:1.7
デュアルフォトダイオード/ハイブリッド手ブレ補正(光学式+電子式)
焦点距離は3つのレンズの中の真ん中の値であり、デュアルフォトダイオードを用いたセンサーによる瞳検出などの処理速度の高速化、ハイブリッド手ブレ補正による手ブレ防止機能性の向上など、人物撮影などの被写体との距離が近い状態での撮影に向いています。
また、F値は3つのレンズの中でも最も小さく、夜間の撮影でも被写体を明るく写しだすことが可能です。
- 「望遠」
遠くの景色などの撮影を得意とするレンズです。
「有効画素数」:約1220万画素
「焦点距離」:70mm
「F値」:2.4
ハイブリッド手ブレ補正(光学式+電子式)
望遠では標準レンズにあったデュアルフォトダイオードがないため、被写体の追尾速度がやや劣るため、人物撮影などの近接撮影は苦手とします。しかし、3つのレンズの中でも、最も焦点距離が大きく、これによって遠くの被写体まで鮮明に映し出すことが可能となっています。さらに、ハイブリッド手ブレ補正によって望遠撮影の際に起こりやすいブレなどを抑えることができます。
また、F値においても3つのレンズの中で最も大きな値となっており、被写体の背景までもはっきりと写すことが可能です。
- 「超広角」
広範囲の景色の撮影を得意とするレンズです。
「有効画素数」:約1220万画素
「焦点距離」:16mm
「F値」:2.2
デュアルフォトダイオード
超広角レンズでは焦点距離が3つのカメラの中で最も小さく、広範囲の景色を一枚の写真に収めることが可能です。また、焦点距離が近いため、景色全体を小さく写すことができます。
これらの3つのレンズについて、有効画素数はすべて1220万画素と同一でした。有効画素数については実は過去機種よりも値が劣ってしまうのですが、その代わりSONYのXperiaではXperia1のときより画素数を小さくして、ピクセルピッチと呼ばれるピクセル同士の間隔を狭めることでより感度の高い写真を撮影できるようにしています。
Xperia1IIにはほかにもセンサーなどを用いた画像処理の技術が用いられているのですが、今回は長くなってしまいましたので、続きはまた次回とさせていただきます。
最後に
ここまでブログを読んでくださった皆様、本当にありがとうございます。
当ブログでは、新卒1年目のエンジニアが個人的に勉強したことや趣味の話などをご紹介しております。
この記事を読んで、もし当ブログにご興味をお持ちいただけましたら是非また当ブログをご利用ください。
当ブログをご利用くださいまして誠にありがとうございます。
それでは皆様、本日もお疲れ様でした。